

Spanish (Español) translation by Claudia Márquez (you can also view the original English article)
[látex] Después de nuestra primera mirada al autofocus, ahora tomaremos un enfoque más técnico. Estoy convencido de que cuanto más entiendas sobre tu cámara y cómo interpreta el mundo desde una perspectiva de ingeniería, más puedes salir de ella para crear tu visión con precisión.
La Historia Técnica Rápida
Leitz, ahora conocido como Leica, comenzó a patentar una serie de tecnologías de sistemas de enfoque automático en 1960, y demostró una cámara de enfoque automático en Photokina (que comenzó en 1950) en 1976. La primera cámara AF de producción masiva fue la Konica C35 de apuntar y disparar lanzada en 1977. La primera cámara réflex de 35 mm AF fue la Pentax ME-F en 1981, seguida de una Nikon F3AF similar en 1983.

Originalmente, todas estas primeras SLR AF tenían motores de lentes, esencialmente una lente estándar con un gran bloque de motor feo pegado en ella. Esto continuó hasta que el 1985 Minolta Maxxum 7000 tenía el motor de accionamiento en el cuerpo de la cámara junto con los sensores.
Este fue el primer AF SLR que tuvo un éxito comercial razonable. Los intentos anteriores fueron lentos, inexactos y solo funcionaron en condiciones ideales, lo que realmente no justifica el doble costo en comparación con cámaras de enfoque manual similares. El Maxxum 7000 le costó a Minolta $ 130 millones en 1991 luego de una prolongada batalla de patentes con la compañía estadounidense Honeywell por la tecnología de AF.

Nikon siguió el traje de Minolta, pero volvió a los motores de lentes en 1992, por lo que las modernas Nikon de nivel de entrada no tienen un motor de accionamiento de AF integrado. El sistema de AF EOS (sistema electro-óptico) de Canon se produjo en 1987, donde molestaron a muchos fotógrafos al dejar caer la montura del objetivo FD y crear la montura EF completamente electrónica.

Bueno, eso es generalmente lo que sucedió y el orden en que ocurrió. Entonces, ¿qué hay de la tecnología en sí? Vamos a cavar un poco más.
Implementaciones físicas
Detección de fase
El autofocus de detección de fase es el AF rápido que se encuentra en las DSLR (y en las cámaras cada vez más sin espejo como parte de un sistema AF híbrido). En las cámaras DSLR, una parte del espejo principal está semi plateada y pasa aproximadamente una cuarta parte de la luz de la lente a un pequeño espejo secundario que se encuentra detrás de ella y hacia la base de la caja del espejo. En la base hay lentes pequeñas que enfocan la luz de los bordes de la lente hacia la matriz de sensores del CCD.

La matriz se compone generalmente de una serie de tiras unidimensionales de píxeles en varias orientaciones. Cada tira solo puede ver una característica que contrasta perpendicularmente a ella, ya que el único cambio que puede ver es a lo largo de la línea. Si una característica de la imagen es paralela a la tira, solo puede ver un aspecto particular de la característica a la vez, en lugar de la "forma" de la misma.
Detección de contraste
La detección de contraste generalmente existe directamente en el propio sensor de imagen, por lo tanto, su uso en vista en vivo en las réflex digitales. Por lo general, es el único sistema de detección disponible en cámaras sin espejo y compactas. Es una implementación de software, por lo que no tiene más aspecto físico real, solo el sensor y un procesador.
Detección híbrida
Como su nombre lo indica, una combinación de ambos sistemas. Esto puede tomar la forma de convertir algunos de los píxeles del sensor en píxeles de AF, o tener una matriz de detección de fase en capas sobre el sensor, que luego funciona junto con el sistema de detección de contraste en tándem para mejorar la velocidad del AF.
Como funcionan las cosas
Ok, ahora que conocemos la configuración física de cada tipo de sistema AF, veamos cómo usan sus respectivas implementaciones para hacer su trabajo.
Enfoque y distancia
El sistema de lentes compuestas (un sistema óptico único formado por una serie de lentes simples, generalmente llamados "elementos" en la literatura de fotografía) en su lente de cámara utiliza una o más lentes móviles para enfocar los rayos de luz en el plano de la imagen.
La distancia al sujeto determina qué tan lejos debe moverse la lente correctiva para enfocar. Considérelo como un par de gafas para la óptica principal, excepto que en lugar de cambiar la potencia de la lente, se cambia su posición.
Tomemos un ejemplo muy simple con solo una lente simple, para mostrar que a medida que el sujeto se mueve, la imagen se desenfoca, aproximada por la fórmula de la lente delgada:
$${1 \over f} = {1 \over S_1} + {1 \over S_2}$$
Esta ecuación asume lentes de grosor insignificante en el aire, por lo que no se traduce con precisión a las lentes del mundo real, pero me permite transmitir el punto de manera más simple.
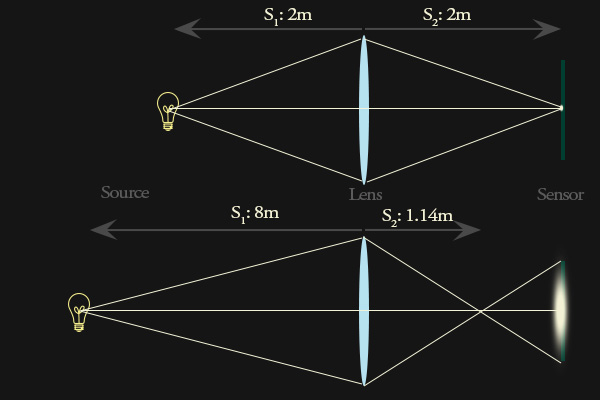
Usamos una fuente de luz puntual con una lente de distancia focal de 1 m (1000 mm). Esto da un valor \ (1\ sobre f\) de 1. Si \ (S_1\) es de dos metros, \ (1\ sobre S_1\) es 0.5. Por lo tanto, \ (S_2\) también es 2m cuando el objetivo está enfocado. Si movemos el sujeto de la fuente puntual a 8m de distancia de la lente, \ (1\ sobre S_1\) se convierte en 1/8. Para compensar, \ (1\ sobre S_2\) debe convertirse en 7\8, lo que requiere un valor \ (S_2\) de 8/7, o 1.14m. Por supuesto, el valor \ (S_2\) se fija porque el sensor está estacionario, por lo que la imagen se desenfoca.
Si insertamos una segunda lente correctiva a la distancia \ (d \) de la primera en este sistema óptico para crear una lente compuesta, podemos enfocar la imagen a medida que el sujeto se mueve. La nueva distancia focal combinada es, según la ecuación de lente delgada compuesta:
$${1 \over f} = {1 \over f_1} + {1 \over f_2} - {d \over f_1 f_2}$$
Así que tenemos una nueva distancia focal. La distancia desde la nueva lente hasta el nuevo punto focal para el sistema combinado se denomina distancia focal trasera, que debería ser un término relativamente familiar en la fotografía, ya que es la distancia desde el elemento trasero al sensor. Si llamo la distancia focal posterior "\ (d_2\)", esto viene dado por:
$$d_2 = {{f_2 (d - f_1)} \over {d - (f_1 + f_2)}}$$
Probemos un ejemplo donde la imagen se enfoca en un plano de imagen fijo, luego el sujeto se mueve. Agregar lentes correctivos divergentes y procesar números nos da esto:
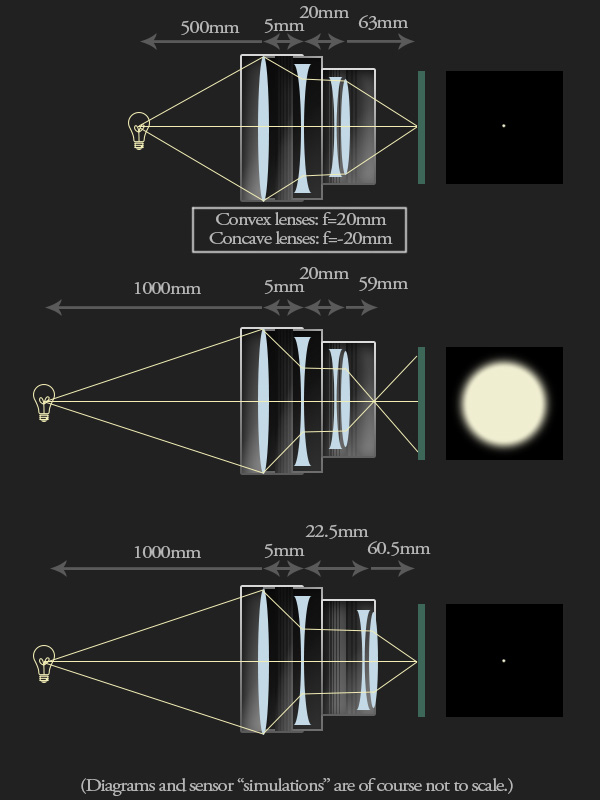
Puede que las matemáticas no sean impecables, ¡pero son lo suficientemente buenas para transmitir el punto! Entonces, a medida que el sujeto se mueve, la lente correctiva debe moverse para compensar porque el plano de imagen está fijo.
En los sistemas de AF, la electrónica calcula a dónde debe moverse la lente y le indica al motor de la lente que la mueva allí. ¿Como hace esto? Esto nos lleva a los sistemas de detección.
Detección de fase
Las lentes pequeñas en la base de la caja del espejo enfocan la luz desde los lados opuestos de la lente. Debido a la brecha entre estos dos puntos, se crea un paralaje donde cada uno ve vistas ligeramente diferentes del sujeto, al igual que las dos lentes de entrada en una cámara de telémetro.
Los puntos individuales están enfocados, al igual que en un telémetro; es la combinación infinita de puntos en el campo de imagen bidimensional que crea el desenfoque focal en una imagen real. Esta es la razón por la cual las aperturas amplias crean más desenfoque; no a través de algún tipo de manipulación óptica, sino simplemente porque se utiliza más del diámetro del vidrio, creando más puntos para superponerse y crear borrosidad. Imagine que AF utiliza una apertura de f / 22 o más pequeña en cada lado de la lente, por lo que la vista permanece enfocada independientemente de la posición focal de la lente.

Mientras que la luz proviene de lados opuestos de la lente, la imagen dividida que va a los sensores de AF es de la misma parte del sujeto, donde se encuentran los puntos de AF en el visor.

Las tiras CCD se leen y envían a un chip AF dedicado, que realiza una comparación entre los dos. Si bien los fabricantes individuales, la tecnología mejorada, la evitación de infracción de patentes y varios puntos de precio de los equipos probablemente alteran el algoritmo exacto utilizado, el punto general aquí es realizar una función matemática llamada autocorrelación o similar.

La autocorrelación es un algoritmo de coincidencia de patrones bajo el paraguas de la correlación cruzada en el procesamiento de señales, pero en lugar de comparar dos señales diferentes, compara una señal con una versión modificada de sí misma. Esencialmente, es una función integral (o más probable en este caso de conjuntos de valores discretos, suma) que calcula, compara y maximiza el área bajo los gráficos de señales superpuestas.
El objetivo es calcular qué tan lejos tiene que desplazar una de las señales para maximizar esa área y, por lo tanto, hacer coincidir las dos vistas. Las matemáticas involucradas son muy largas (es probable que se necesiten varios artículos para analizar un ejemplo básico), pero el resultado del algoritmo final general debería estar entre 1 y -1, con la cámara buscando el valor de cambio donde la correlación El valor es lo más cercano a 1 como sea posible.
Al hacer esto, ve y comprende la misma característica que viene de cada lado de la lente, y al conocer el cambio espacial físico entre ellos a lo largo de la franja de píxeles, con trigonometría basada en las dimensiones conocidas de la cámara, qué tan lejos y en qué dirección está fuera de foco. Luego puede enviar una señal de enfoque a la lente y verificar el enfoque después del movimiento. Ahí es cuando su cámara indica bloqueo de enfoque y permite que se tome la imagen.

Es posible que haya oído hablar de puntos AF tipo "punto" o "punto" en comparación con puntos AF tipo "cruz". La diferencia entre ellos es que los puntos de tipo punto son tiras de píxeles unidimensionales, mientras que los puntos de tipo cruz son dos líneas dispuestas perpendicularmente. Debido a que un sensor de AF es unidimensional, solo puede ver el cambio de luminancia a lo largo de su longitud. Los sensores de tipo punto son, por lo tanto, solo sensibles al detalle en una dirección, mientras que los tipos cruzados pueden ver a través de dos dimensiones.
Si un sensor de tipo punto está paralelo con una característica de detalle principal, no puede ver la diferencia entre él y su característica de contraste adyacente, y por lo tanto tiene una dificultad significativa para enfocar.

Detectar contraste
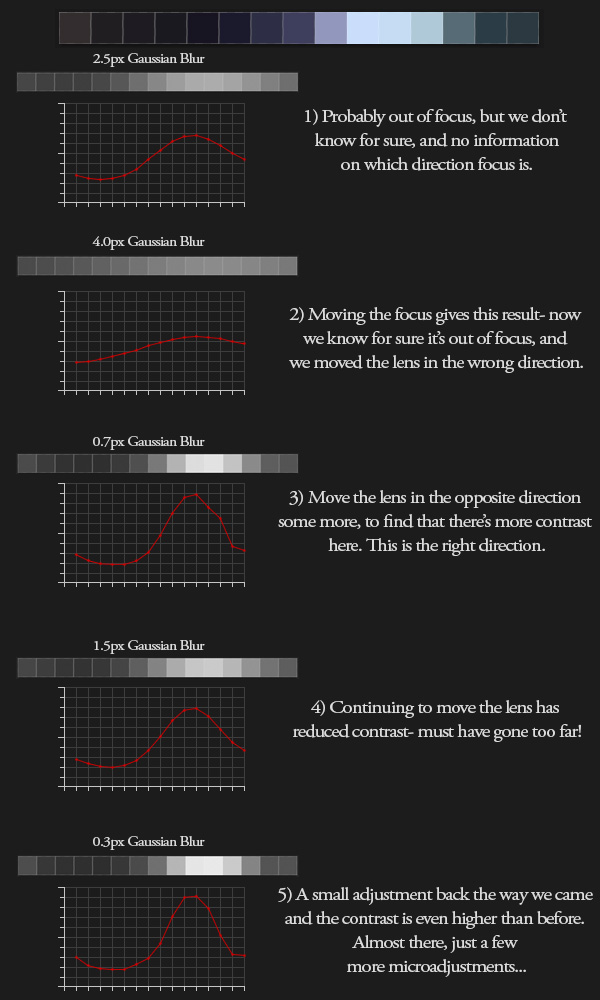
Este método lee algunos píxeles en la posición de enfoque deseada del sensor de imágenes. El procesador calcula el valor de contraste entre estos píxeles, la diferencia de luminancia sobre el espacio de píxeles que se está midiendo. Al calcular el gradiente de la curva a lo largo de las líneas de píxeles y las columnas, puede buscar maximizar el valor de este gradiente.

El enfoque de la lente se mueve entonces de manera fraccionada y el contraste se calcula nuevamente. Si el contraste es más bajo, el sistema ha movido la lente en la dirección incorrecta, por lo que luego se mueve en la dirección opuesta. El contraste se mide de nuevo, la lente se mueve más y este proceso se repite a medida que el valor de contraste aumenta hasta que cae. Cuando cae, la lente ha ido demasiado lejos y el algoritmo vuelve a mover la lente, haciendo más microajustes.
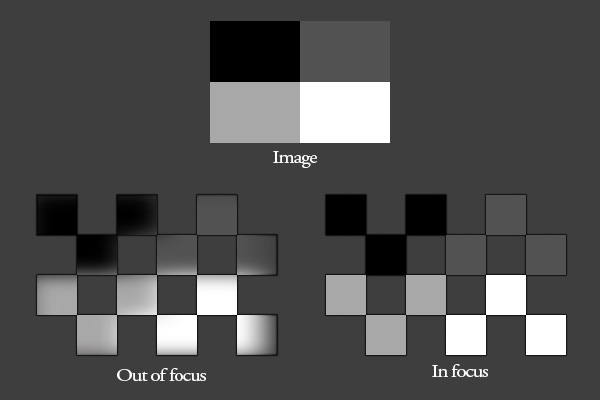
El método de detección de contraste de AF tiene el potencial de ser extremadamente preciso porque está en el nivel del sensor, no en un sistema separado. Simplemente mueve la lente hasta que se maximiza el contraste. Desafortunadamente por la misma razón, parece improbable que alguna vez sea rápido; podría argumentar que solo debería requerir una medición en dos posiciones focales para saber cuánto se desenfoca el lente, pero eso requiere que la cámara sepa exactamente con qué contraste está el sujeto para comenzar.
No tiene forma de saber cuál será la distribución "verdadera" de los valores de luminancia medidos, ya que dependen del sujeto. Esta es la razón por la que tampoco puede haber un "gradiente de umbral" ni un "valor de luma pico ideal". Estas cosas varían mucho de una escena a otra.

Por lo tanto, en el futuro previsible, el cine profesional continuará utilizando tiradores de enfoque manuales como siempre lo ha hecho, y los puntos y tomas sin espejo continuarán siendo lentos. A no ser que...
Sistemas hibridos
¿Qué pasaría si pudieras obtener lo mejor de ambos mundos? ¿Qué pasaría si pudiera hacer que la velocidad de la fase detecte y elimine la caza, pero combine eso con la precisión y simplicidad de la detección de contraste? Bueno, eso es exactamente lo que los fabricantes están haciendo ahora.
En lugar de colocar las tiras de detección de fase en la parte inferior de una caja de espejo, que no sirve para nada en las cámaras sin espejo y las DSLR en vista en vivo, en su lugar se crean como matrices dedicadas al sensor de imagen. Pero seguramente no hay nada que coincida con la fase en el sensor, porque está siendo arrastrada por toda la luz del resto de la lente en un gran círculo borroso de confusión como dije antes. ¡No tan rapido!
Debido a que los píxeles (técnicamente "sensores", ya que son elementos sensores y no elementos de imagen) en un sensor de imagen están cubiertos por microlentes para mejorar la captación de luz, todo lo que necesitamos hacer es bloquear la mitad del píxel para obtener la imagen de un lado de la lente. Es este ideal? No, la imagen seguirá siendo borrosa, pero la mitad estará borrosa cuando se ve la lente completa, y ahora podemos usarla para detectar con mayor precisión el enfoque porque habrá un paralaje entre las dos imágenes.

En los Fuji X100, esta tecnología se utiliza para reforzar las ayudas visuales de enfoque manual con una superposición de EVF tipo prisma dividido, pero Sony lo utiliza como un verdadero sistema híbrido junto con AF de detección de contraste como "AF híbrido rápido" en su nivel más alto -en las cámaras NEX. Canon y Nikon también usan este concepto en sus cámaras de gama baja. En el A99 de Sony, una segunda matriz de detección de fase dedicada aprovecha el espejo translúcido al ser superpuesta directamente en frente del sensor de imágenes, conocido como Dual AF.
Por lo tanto, la capacidad de detección de fase en condiciones de poca luz no es gran cosa, tiende a limitarse a un punto central para reducir la cantidad de píxeles extraídos del uso de imágenes, y la tecnología está en su infancia. Pero con sistemas más dedicados como los arreglos Dual AF de Sony, y tal vez algunos píxeles de sensores de imagen "sacrificados" (mediante la interpolación de software) con microlentes más direccionales, este parece ser el futuro del enfoque automático.
Conclusión
Así que hemos venido de la invención del enfoque automático, a través de su desarrollo y adopción generalizada. Hemos examinado la mecánica óptica fundamental del enfoque. Sabemos qué tipos de AF hay, dónde están en la cámara y cómo funcionan, así como cómo estos atributos afectan prácticamente el rendimiento de la cámara. Hemos echado un vistazo a los desarrollos recientes en sistemas de autofocus híbridos y hemos considerado dónde pueden continuar desde aquí.
Cuando use AF, considere cómo la cámara está viendo la escena y ajústela en consecuencia. Cuando compre cámaras, eche un vistazo a sus sistemas de AF y cómo pueden funcionar para su estilo de disparo.
Bueno, eso es un resumen de esta descripción técnica del enfoque automático. Preguntas? ¿Comentarios? Golpee los comentarios a continuación!
 By
By









